中国のAI搭載ロボット、2025年までに製造業を変革へ
MagicLabやAgiBotといった中国のヒューマノイドロボット企業は、先進的なAIモデルを統合し、製造業の能力を変革しつつある。MagicLabの呉長征CEOは、DeepSeek、アリババのQwen、バイトダンスのDoubaoといったAIモデルを活用し、品質検査、資材搬送、組立作業向けのロ...
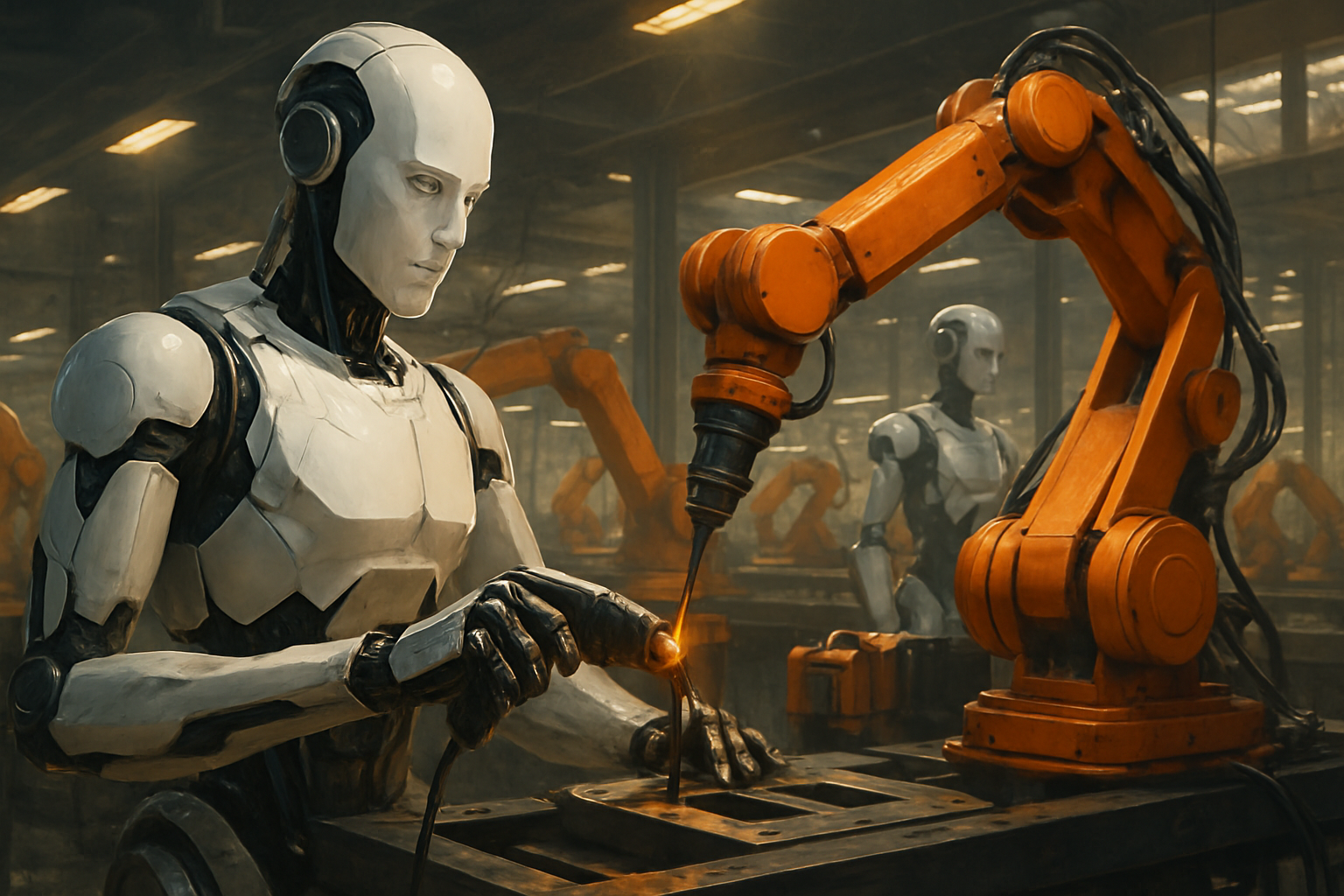
MagicLabやAgiBotといった中国のヒューマノイドロボット企業は、先進的なAIモデルを統合し、製造業の能力を変革しつつある。MagicLabの呉長征CEOは、DeepSeek、アリババのQwen、バイトダンスのDoubaoといったAIモデルを活用し、品質検査、資材搬送、組立作業向けのロ...

ブリストル大学の科学者たちは、タコの神経系を模倣し、中央コンピュータなしで環境を感知し意思決定できる画期的なソフトロボットを発表した。この革新的な設計は、空気や水の流れを利用して吸着や動きを協調させており、タコが複数の腕にある何百もの吸盤を使う仕組みに似ている。この成果は、吸着流が単なる接着だ...

科学者たちは、ADAPT Handというロボットハンドを開発しました。この手は、人間のような動きを自発的に生み出しながら、24種類の物体を93%の成功率で把持できます。複雑なプログラミングに頼るのではなく、手全体に分散された柔軟な素材と構造を活用することで、自然な動作パターンを実現しています。...
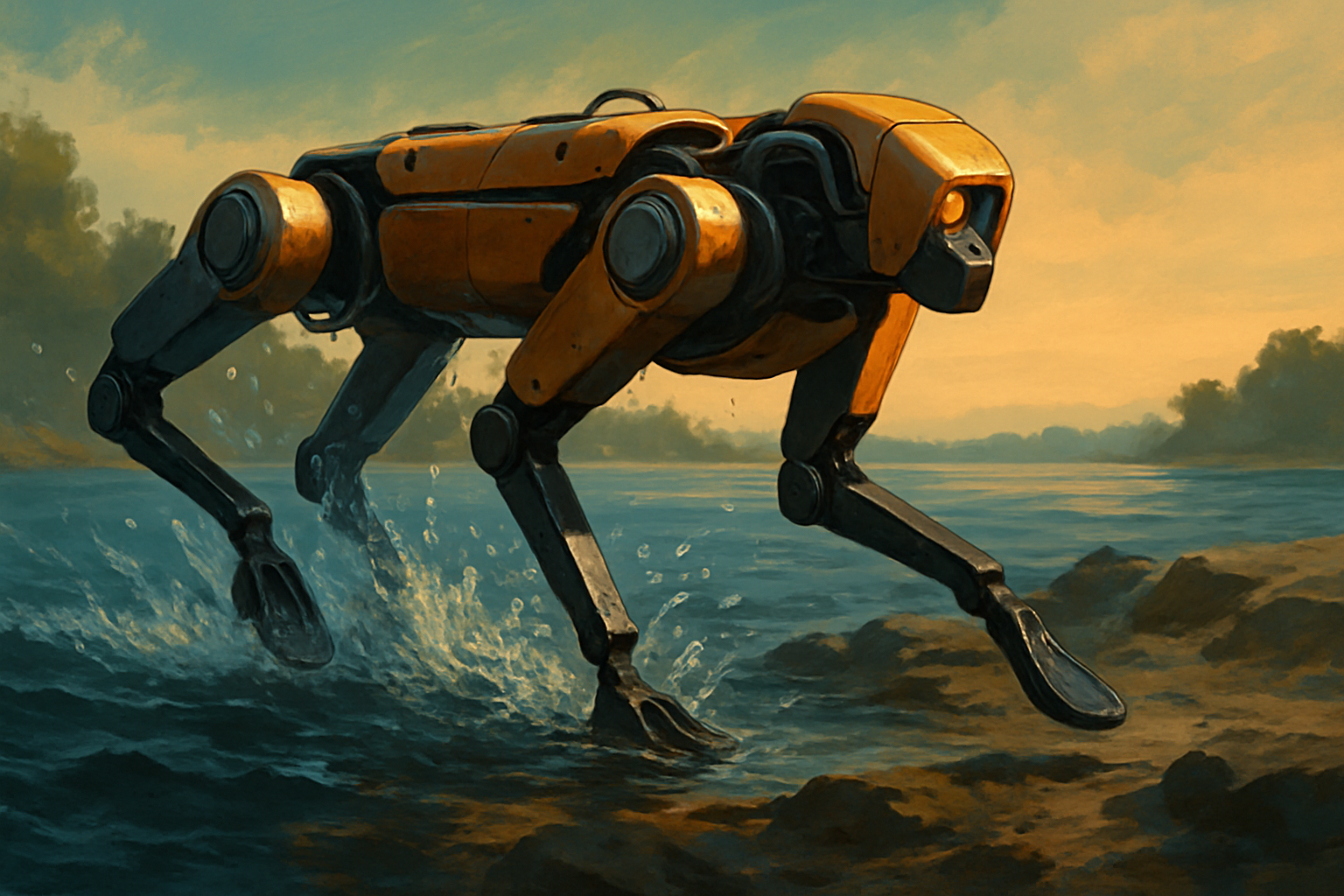
華南理工大学の研究者チームが、陸上と水中の両方で効率的に移動できる革新的な両生型ロボット犬を開発しました。AI制御の四足歩行ロボットは、生物模倣型の軌道計画を用いて、犬の自然なパドリング歩行を再現し、さまざまな地形で優れた機動性を実現しています。この多用途な技術は、捜索救助、環境モニタリング、...

カリフォルニア工科大学(Caltech)のエンジニアは、乱流の水流を推進力として活用する省エネルギー型のロボット潜水艦を開発した。2025年5月12日付でPNAS Nexus誌に発表された研究によると、「CARL-Bot(Caltech Autonomous Reinforcement Lea...
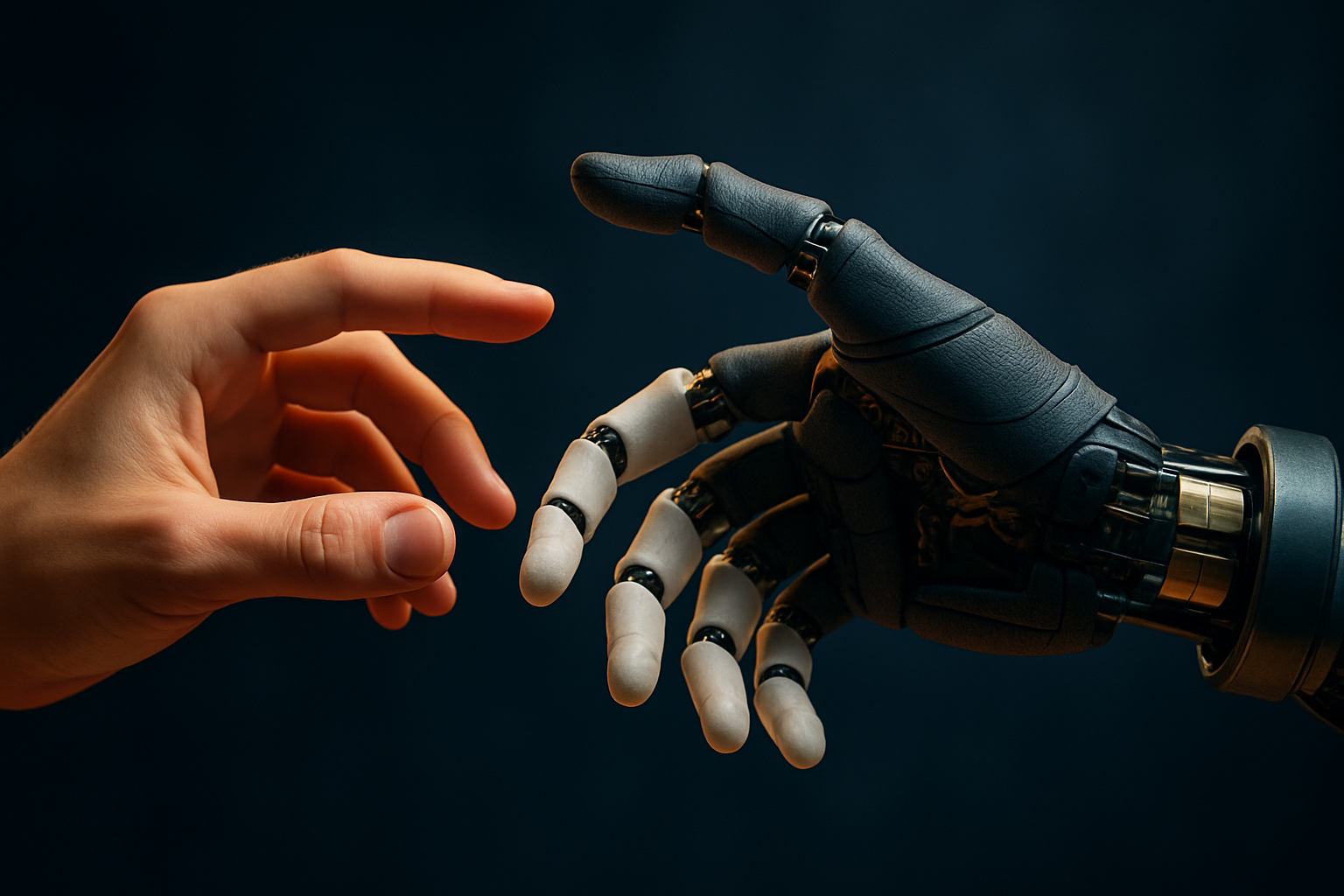
EPFLの研究者たちは、複雑なプログラミングを必要とせず、人間のような動きを自発的に生み出して多様な物体をつかめるロボットハンドを開発した。ADAPTハンド(Adaptive Dexterous Anthropomorphic Programmable sTiffness)は、シリコンストリッ...

EPFLの研究者たちは、複雑なプログラミングではなく、柔軟な素材によって人間のような把持を実現するロボットハンド「ADAPTハンド」を開発しました。この革新的な手は、シリコンストリップとバネ仕掛けの関節を活用し、自己組織的な動きを生み出します。24種類の多様な物体を93%の成功率で把持し、その...